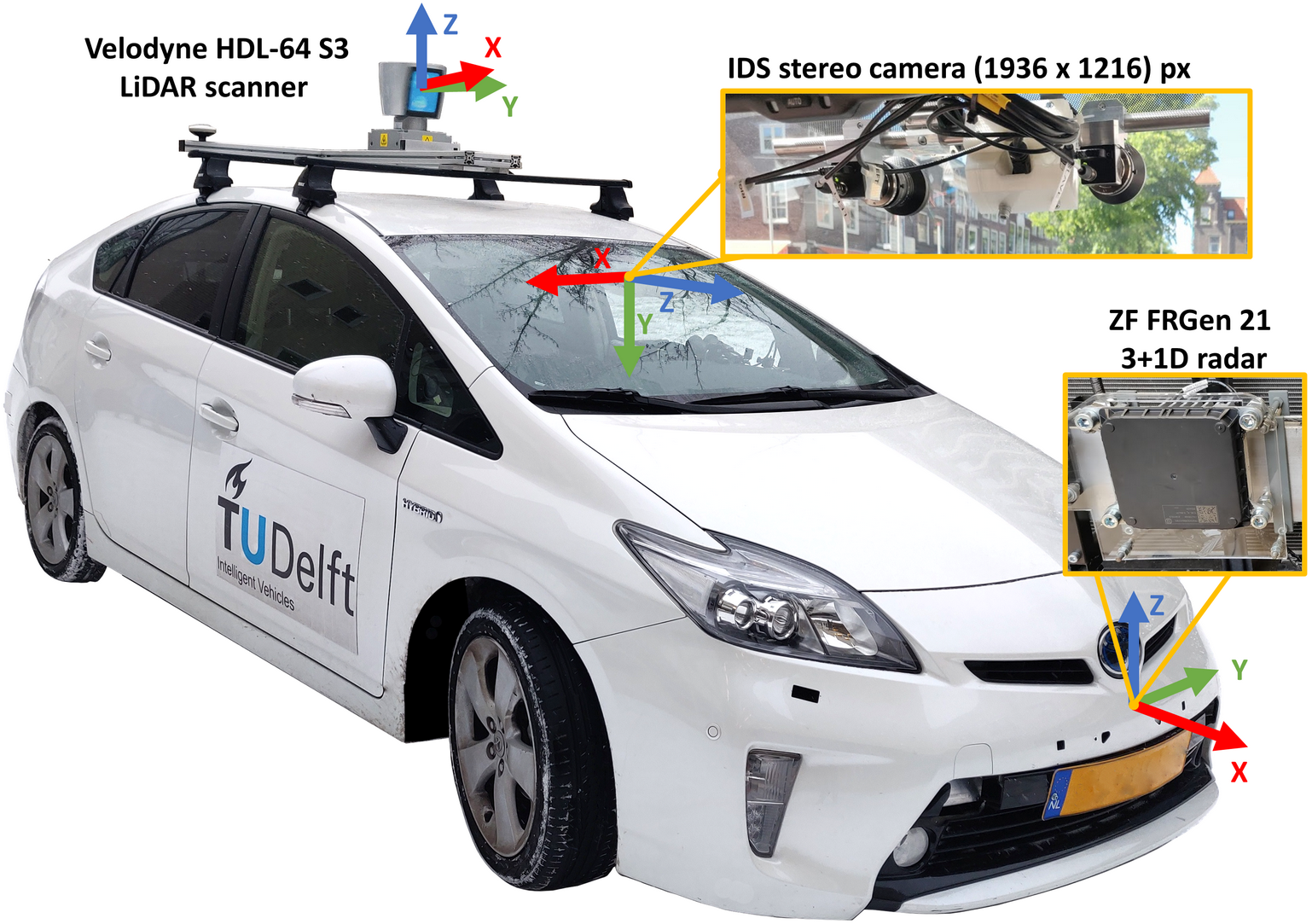
Welcome to the homepage of the View-of-Delft (VoD) dataset, a novel automotive dataset recorded in Delft, the Netherlands. It contains 8600+ frames of synchronized and calibrated 64-layer LiDAR-, (stereo) camera-, and 3+1D (range, azimuth, elevation, + Doppler) radar-data acquired in complex, urban traffic. It consists of 123100+ 3D bounding box annotations of both moving and static objects, including 26500+ pedestrian, 10800 cyclist and 26900+ car labels. At the time of publication, VoD dataset is the largest automotive multi-class object detection dataset containing 3+1D radar data, and the only dataset containing high-end (64-layer) LiDAR and (any kind of) radar data at the same time.
For access, documentation, development kit, and example codes please visit:
https://tudelft-iv.github.io/view-of-delft-dataset/


If you find the dataset useful in your research, please consider citing us as:
@ARTICLE{apalffy2022,
author={Palffy, Andras and Pool, Ewoud and Baratam, Srimannarayana and Kooij, Julian and Gavrila, Dariu},
journal={IEEE Robotics and Automation Letters},
title={Multi-class Road User Detection with 3+1D Radar in the View-of-Delft Dataset},
year={2022},
volume={},
number={},
pages={1-1},
doi={10.1109/LRA.2022.3147324}}
Recent Comments