
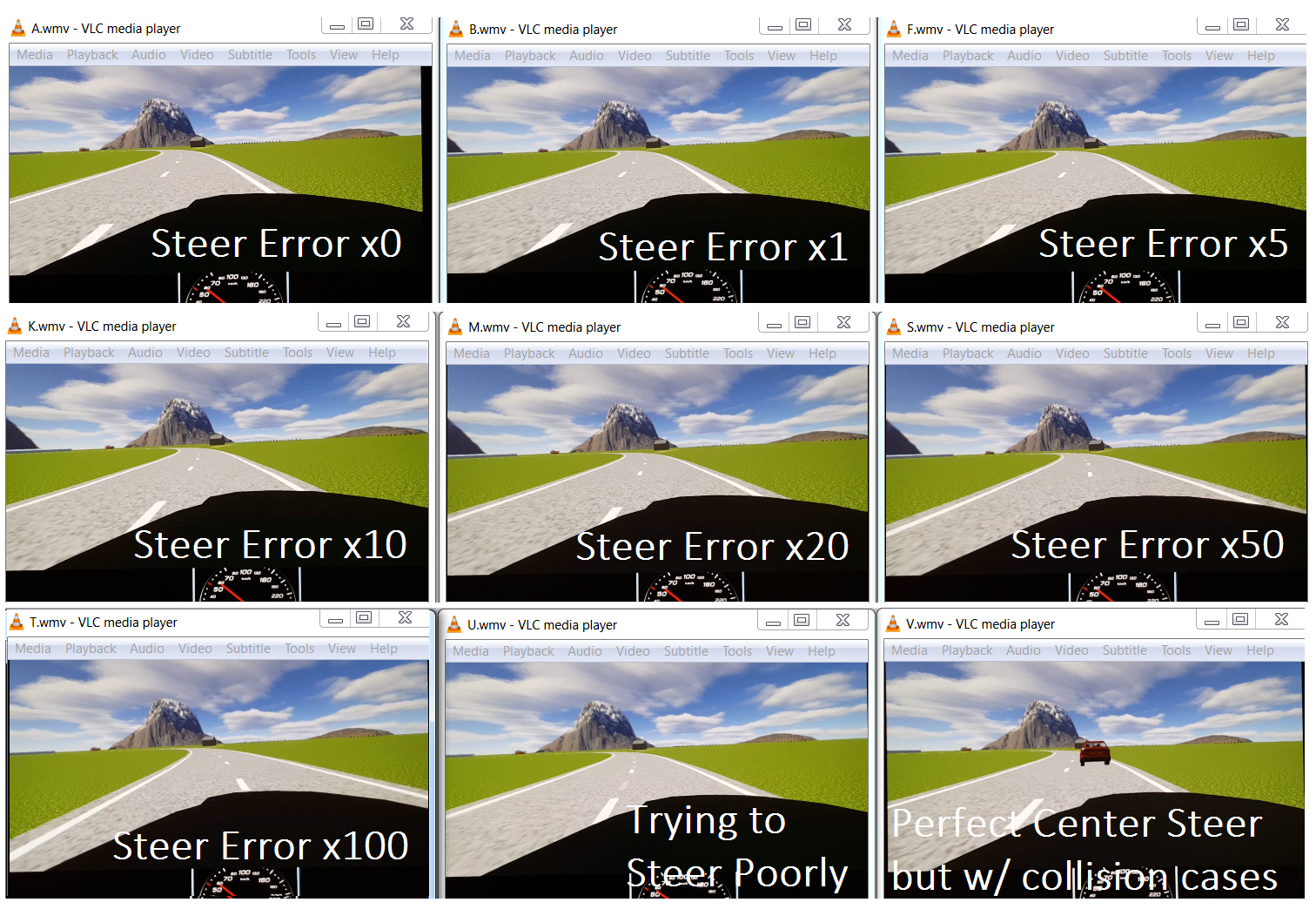
Lane position after about 45 seconds of following the same path but with different levels of added steering error
Background:
A group of graduating Bachelors students in BioMechanical Engineering modeled the additional error that might be added to steering through implementing a remote steering device based upon specific mechanical properties of their design. The average and peak resultant additional error to various simulated standard steering paths (step function, sine wave, double lane change task) appeared small/manageable, but it was desired to visualize this error and especially for when trying to follow a more extended driving task.
Online Driving Video Ratings:
(October, 2017)
Around 100 different people viewed and rated 2.5 minute simulated driving videos. Each person was randomly assigned to view one video of nine different possible kinds. Ratings were collected following a slightly modified Van der Laan system acceptance scale (http://www.hfes-europe.org/accept/accept.htm)
Van der Laan, J.D., Heino, A., & De Waard, D. (1997). A simple procedure for the assessment of acceptance of advanced transport telematics. Transportation Research – Part C: Emerging Technologies, 5, 1-10.
Nine different simulated driving videos were created. The first video (c1A) was recorded by manually driving the simulator without any additional error and recording the input steering angles at 60 hz. Subsequently the modeled error from a simulated remote driving steering robot was added in for the second video (c2B). Additional videos were recorded with increasing multiples of the originally modeled steering error x5, x10, x20, x50, x100 (c3F, c4K, c5M, c6S, c7T). To test the sensitivity of the rating scale, a video was recorded with intentionally poor steering without any modeled error (c8U). Lastly, as a point of comparison an automated driving session was recorded that maintained perfect steering down the middle of the lane, but ran over both a tree and a stalled motorcyclist (c9V)
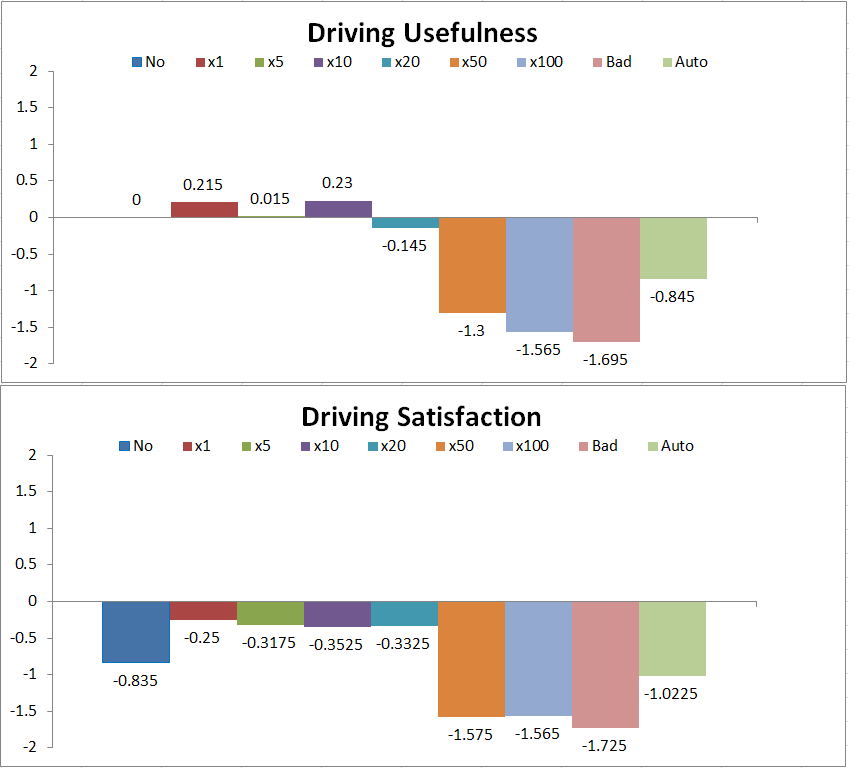
Acceptability of various sizes of modeled steering error induced from simulated tele-remote driving.
Preliminary results indicate general (undifferentiated) acceptance of the driving whether with the originally modeled additional steering error or with up to 20x the size of that error.
Recent Comments